Radar is an object-detection system designed for detecting and tracking objects (targets) at considerable distances.The word radar is an acronym derived from the phrase Radio Detection And Ranging.
Principle of operation
A radar system has a transmitter that emits radio waves called radar signals in predetermined directions. When these come into contact with an object they are usually reflected or scattered in many directions. The radar signals that are reflected back towards the transmitter are the desirable ones that make radar work.
Radar equipment
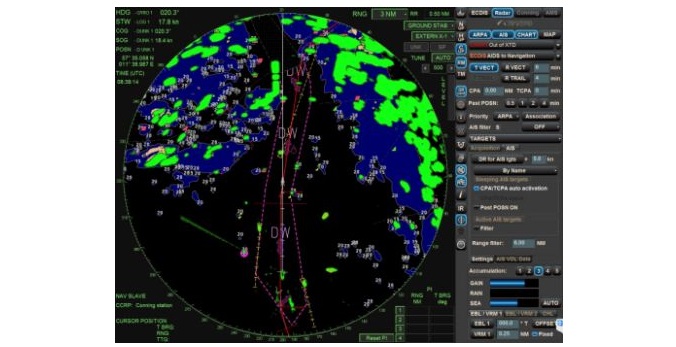
Radars transmit directional microwave radio pulses with a rotating ariel (the scanner) in a 360º circle around the machine. It detects the bearing and range of echoing pulse returns from significant surrounding targets to produce a map like display.