- The spin axis.
- The horizontal axis.
- The vertical axis.
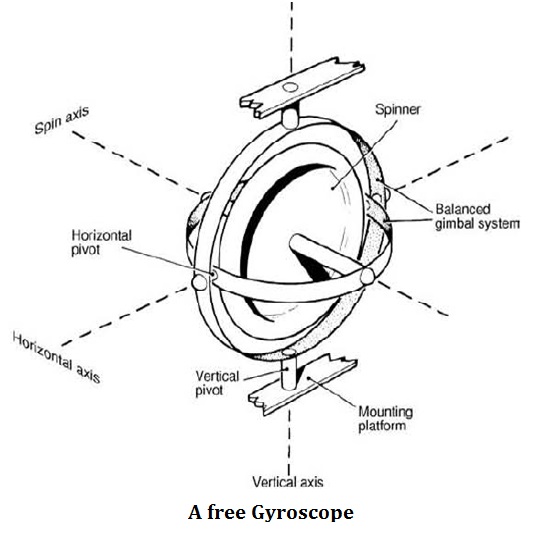
Basic Operation of free Gyroscope
A free gyroscope possesses certain inherent properties, one of which is inertia, a phenomenon that can be directly related to one of the basic laws of motion documented by Newton. Newton’s first law of motion states that ‘a body will remain in its state of rest or uniform motion in a straight line unless a force is applied to change that state’. Therefore a spinning mass will remain in its plane of rotation unless acted upon by an external force. Consequently the spinning mass offers opposition to an external force. This is called ‘gyroscopic inertia’
