An autopilot (or pilot) is a mechanical, electrical or hydraulic system which can maintain a vessel on a predetermined (set) course without the need for human intervention. Using a direct or indirect connection with a vessel’s steering mechanism, the autopilot relieves the crew from the task of manually steering the ship.
Autopilot have evolved from simple course holding systems to adaptive computer systems that offer reduced fuel costs and increased transit times. These new systems learn the characteristics of the vessel’s handling and minimize rudder movement reducing drag on the vessel. Increased speed and lower fuel consumption makes autopilot more user friendly.
Autopilots do not replace a human operator, but assist them in controlling the ship, allowing them to focus on broader aspects of operation, such as monitoring the trajectory, weather and systems.
- This instrument is not to replace the helmsman.
- It is not to be used in restricted waters or during manoeuvring.
- Not to be used for large alterations of more than 15-20
- Autopilot will operate efficiently over a certain speed (approx. > 5 knots), below which it will start to wander.
- Autopilot is normally used when ship has to steer same course for long period of time.
What is the working principle of the autopilot system?
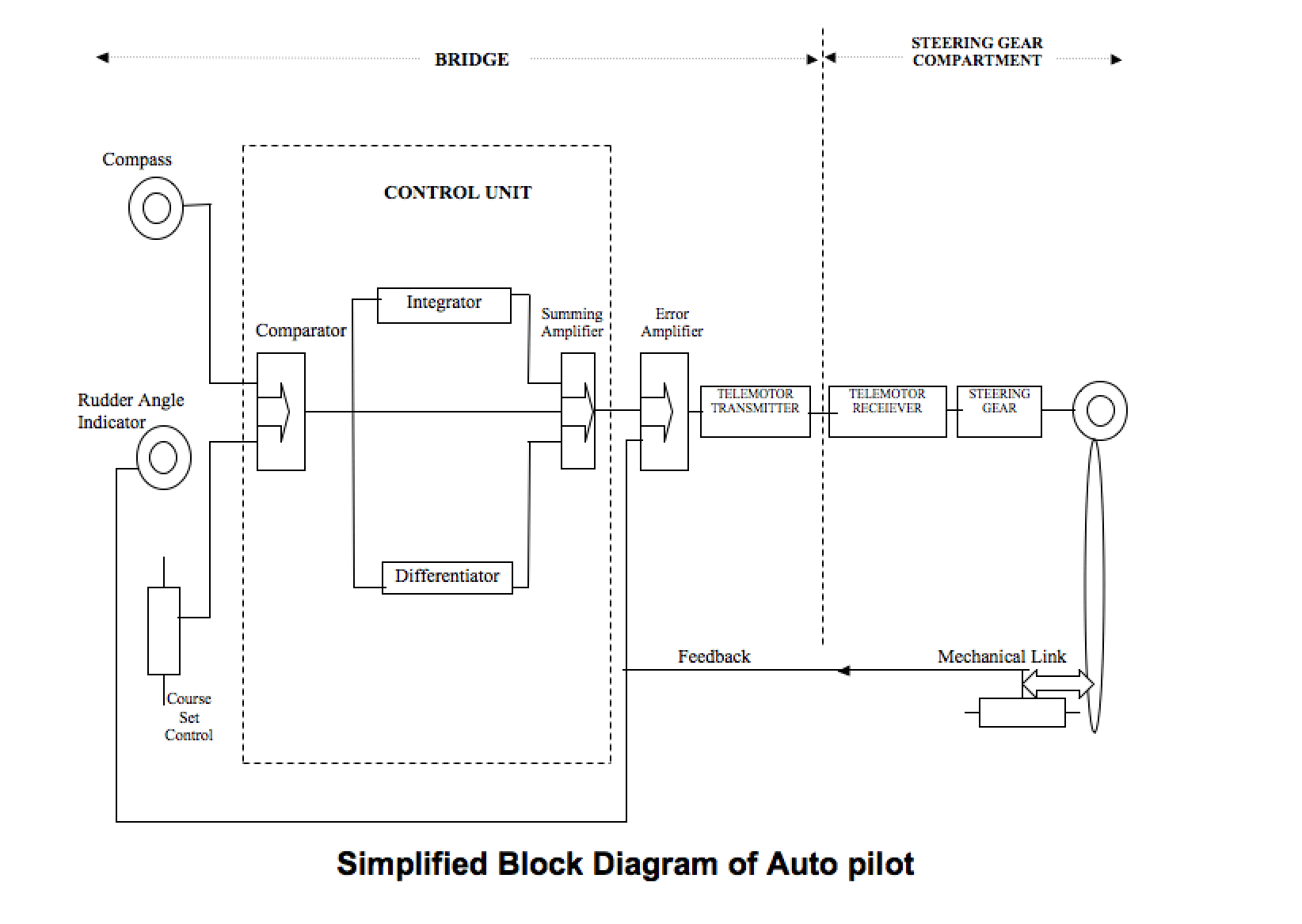
An output from a gyro or magnetic repeating compass is coupled to a differential amplifier along with a signal derived from manual course-setting control. If no difference exists between the two signals, no output will be produced by the amplifier and no movement of the rudder occurs. When a difference is detected between the two sources of data, an output error signal, proportional in magnitude to the size of the difference, is applied to the heading error amplifier. Output of this amplifier is coupled to the rudder actuator circuit, which causes the rudder to move in the direction determined by the sign of the output voltage. The error signal between compass and selected course inputs produces an output voltage from the differential amplifier that is proportional to the off-course error. This type of control, therefore, is termed ‘proportional’ control. As it has been shown, the use of proportional control only, causes the vessel to oscillate either side of its intended course due to inertia producing overshooting.
PROPORTIONAL CONTROL
The effect on steering when only proportional control is applied causes the rudder to move by an amount proportional to the off-course error from the course to steer and the ship will oscillate on either side of the required course line.
DERIVATIVE CONTROL
The rudder is shifted by an amount proportional to the rate of change of ship’s deviation from the course. The ship will make good a course which is parallel to the required course and will continue to do so until the autopilot is again caused to operate by an external force acting on the ship.
INTEGRAL CONTROL
There are certain errors due to the design parameters of the vessel which have to be corrected. Data signals are produced by continuously sensing heading error over a period of time and applying an appropriate degree of permanent helm is used for this purpose. The permanent helm acts as mid-ship.
PID CONTROL
The output of the three controls is combined and the net resultant drives the rudder. This type of autopilot is also called as PID Auto Pilot.
A Proportional–Integral–Derivative Controller (PID controller) is a control loop feedback mechanism (controller) commonly used in industrial control systems. A PID controller continuously calculates an error value as the difference between a desired set point and a measured process variable. The controller attempts to minimize the error over time by adjustment of a control variable, such as the position of a control valve, a damper, or the power supply.
- P accounts for present values of the error. For example, if the error is large and positive, the control output will also be large and positive.
- I accounts for past values of the error. For example, if the current output is not sufficiently strong, error will accumulate over time, and the controller will respond by applying a stronger action.
- D accounts for possible future values of the error, based on its current rate of change
With a Proportional, Integral and Derivative steering control system, the oscillation is minimized by modifying the error signal produced as the difference between the selected heading and the compass heading. Figure shows that a three-input summing-amplifier is used, called a dynamics amplifier, to produce a resultant output signal equal to the sum of one or more of the input signals.
The demanded rudder error signal is inspected by both the differentiator and the integrator. The differentiator determines the rate of change of heading as the vessel returns to the selected course. This sensed rate of change, as a voltage, is compared with a fixed electrical time constant and, if necessary, a counter rudder signal is produced. The magnitude of this signal slows the rate of change of course and thus damps the off-course oscillation.
Obviously the time constant of the differentiation circuit is critical if oscillations are to be fully damped. Time constant parameters depend upon the design characteristics of the vessel and are normally calculated and set when the vessel undergoes initial trials. In addition, a ‘counter rudder’ control is fitted in order that the magnitude of the counter rudder signal may be varied to suit prevailing conditions
What are settings of Autopilot system?
- Permanent helm:
To be used only if a constant influence, like cross wind or beam sea is experienced. If there is a very strong beam wind from starboard side then a permanent 5 degrees starboard helm may be set.
- Rudder:
This setting determines the rudder to be given for each degree of course drifted. Eg. 2 degrees for every 1 degree off course.
- Counter rudder:
Determines the amount of counter rudder to be given once v/l has started swinging towards correct course to stop swing. Both rudder & counter rudder to be set after considering condition of v/l (ballast, loaded, etc.). Eg. Laden condition full ahead, not advisable to go over 10 degrees rudder.
- Weather:
The effect of weather & sea conditions effectively counteracted by use of this control. This setting increases the dead band width. Comes in handy if vessel is yawing excessively.
What are different Steering modes of Auto Pilot?
- Auto / manual: allows user to select between manual steering & autopilot. Officer to steer correct course, rudder to be on midships,course to steer set (gyro pointer on lubber line), off course alarm set before changing over to autopilot.
- Follow up: if rudder is to be put on starboard 10, helm is put on starboard 10. When helm is on midship rudder will return to midships.
- Non-follow up: if rudder to be put on starboard 10 helm is turned to starboard, a few degrees before starboard 10 the helm is put on midships, rudder then settles on starboard 10. If rudder goes beyond starboard 10, slight port helm to be given. Rudder will remain on starboard 10 even when helm is returned to midship. To bring it back to midships port helm to be given.
What is Off course alarm?
- It is fitted on the autopilot usually set for 5 or 10 degrees. If difference between actual course & course set by officer for autopilot is more than value set for alarm, it will sound.
- This alarm will not sound in case of gyro failure.
- Only indication in this case is a gyro failure alarm. Gyro compass & repeaters to compared frequently along with magnetic compass.
What are disadvantages of Autopilot?
- The auto pilot gives rudder according to the gyro heading.
- If the gyro fails the autopilot will still keep the gyro course & wander with the gyro.
- Gyro alarm to be taken seriously or the v/l will collide if there are sudden alterations.